Call for contributions deadline: 14 May 2023
Send your A1 poster contribution to Dr Sara Abad
Notification of acceptance: 15 May 2023
Tutorial date: 2 June 2023
Highlights
- Hands-on tutorial session and best poster prize.
- Soft robotics debate led by Prof. Laura Blumenschein and podcast series on soft robotic software packages released during ICRA 2023 led by Ms Marwa El Diwiny.
- The results of this tutorial session will be a roadmap towards an accessible soft robotic toolbox AND a repository collecting currently developed software packages.
- All speakers will be in person, streaming link will be made available.
Confirmed speakers

Prof. Christian Duriez
Research Director, INRIA, Université de Lille, France
Soft-robotics plugin in SOFA and the Tripod Tutorial
In this lecture, the main mechanical models used in soft robotics will be briefly presented in a unified way: FEM, beam elements, Cosserat rods, rigid bodies… as well as the modeling of actuators, sensors and interactions like collisions. Then, the implementation of these components in the open-source framework SOFA will be presented. The lecture will end with the presentation of a tutorial with an open-source design robot called the Tripod. This tutorial will follow the steps of modeling the robot, mixing deformable and rigid parts, and then controlling it by inverse modeling through optimization.
 Dr Chapa Sirithunge
Dr Chapa Sirithunge
Research Associate, University of Cambridge, UK
Machine Learning for Soft Robot Sensing and Control
Developing feedback controllers for robots with embedded sensors is challenging and typically requires expert knowledge. As machine learning (ML) advances, the development of learning-based controllers has become more and more accessible, even to non-experts. This tutorial will educate the audience about ML-based sensing and control in cyber-physical systems using a soft robotic device. We demonstrate this by creating a recurrent neural network-based closed-loop force controller for a soft finger with embedded soft sensors. The focus of this tutorial will be on the modelling of soft elements and sensors, estimation of state through regression and machine learning based approaches and controlling the forces acting on soft bodies using feedback control. Throughout the tutorial, we will explore different techniques for modelling the soft finger and its sensors, and then use machine learning and regression methods to estimate the finger’s state. We will also discuss various feedback control techniques that can be used to regulate the force acting on the soft body. Overall, this tutorial provides an excellent opportunity for anyone interested in the field of soft robotics to gain hands-on experience and insight into the various methods used in the field.
 Prof. Perla Maiolino
Prof. Perla Maiolino
Associate Professor, University of Oxford, UK
A Toolbox of Designing Soft Pneumatic Actuators for Shape Matching based on Surrogate Modelling
In this lecture, we will discuss a shape-matching design framework for bellow soft pneumatic actuators (SPAs) that expedites the actuator design process. Actuation of a soft robot involves transforming its shape from an initial state to a desired operational state. Achieving task-specific design requires mapping the shape between these two states to the robot’s design parameters. Existing kinematic models for soft robots are often limited in accuracy and generality due to the robot’s flexibility and nonlinearity, and current shape-matching algorithms are not well-suited for 3D cases. To address this challenge, the proposed design framework includes a kinematic model of the bellow SPA and a surrogate model trained using an Artificial Neural Network and Finite Element Method (FEM) simulations. The framework also includes a 3D shape-matching algorithm composed of a 3D piecewise-constant curvature segmentation and a bi-level Bayesian optimization algorithm based on the surrogate model to find optimal actuator design parameters that match the desired shape.
 Prof. Luc Marechal
Prof. Luc Marechal
Associate Professor, Université Savoie Mont Blanc, France
The Soft Robotics Materials Database app
This tutorial will provide an overview of the open source Soft Robotics Materials Database and its web App designed to aid material selection for soft Robotics application. It will also include an introduction to modelling constitutive models for hyperelastic materials from experimental tensile test data. Attendees will be able to practice experimental data fitting using a non linear optimization technique by coding and testing their own Python script under a Jupyter notebook.
 Prof. Sheila Russo
Prof. Sheila Russo
Assistant Professor, Boston University, France
Validation of Soft Surgical Robots: from Experimental Test Rigs, Simulations, Animal Models
Soft surgical robots have emerged as a promising technology for minimally invasive surgical procedures. Validating these robots requires a comprehensive approach that includes material testing, safety testing, functional testing, and testing on animal models. Material testing involves evaluating the durability, flexibility, and biocompatibility of the soft materials used in the robot’s construction. Functional testing evaluates the robot’s ability to perform its intended functions, such as moving, manipulating tissues, and navigating through the body’s anatomy. Building experimental test rigs is a critical step in the validation process. These test rigs are designed to replicate the physical and mechanical conditions of surgical procedures, allowing researchers to test and evaluate the performance of the soft surgical robot under various conditions. Test rigs can simulate the forces and stresses that the robot will encounter during surgery, as well as the anatomical structures that it will navigate through. Testing on animal models involves using the robot to perform surgical procedures on explanted animal organs and tissues (ex-vivo tests) or live animal models (in-vivo tests) to evaluate its performance and safety. In addition, simulations can be used to complement the experimental validation process and predict the behavior of a soft surgical robot under different conditions, simulate the forces and stresses that the robot will encounter during surgery and the deformation and movement of the soft materials. This talk will present a framework for validating soft surgical robots, building experimental test rigs to evaluate their capabilities, performing finite element model simulations, and ultimately, assessing their performance through ex-vivo tests on explanted animal tissues and organs.
 Prof. Anup Teejo Mathew
Prof. Anup Teejo Mathew
Post Doctoral Fellow, Khalifa University, UAE
SoRoSim: a MATLAB® Toolbox for Hybrid Rigid-Soft Robots
Simple, fast, and accurate modeling techniques are necessary to realize the full potential of soft robots. One intriguing technique is using Geometric Variable Strain (GVS) methods that rely on relative model reduction through strain parameterization of the soft robot. A noteworthy aspect of this model is that it also encompasses the geometric theory of rigid robotics, allowing for the generalization of many advantages of this well-established field. We developed a user-friendly MATLAB toolbox, SoRoSim, which employs GVS.
In this talk, I will briefly describe the theoretical and computational framework of the GVS approach. Then I will present a tutorial on the SoRoSim toolbox that employs this method. I will do a simple demonstration of creating robot links and linkages using the toolbox. The SoRoSim can do fast static equilibrium simulations and real-time dynamic simulations. I will demonstrate this using the linkage created. Simulation results of complex examples will also be shown to highlight the potential of the toolbox.
 Dr S.M. Hadi Sadati
Dr S.M. Hadi Sadati
CME Research Fellow, King’s College London, UK
TMTDyn Matlab Package for Modelling and Control of Hybrid Rigid-Continuum Robots
Hybrid rigid–continuum robot design addresses a range of challenges associated with using soft robots in application areas such as robotic surgery. Utilizing such robots poses challenges beyond standard rigid-body robots. A fast, reliable, accurate yet simple dynamic model is important to support the design, analysis, and control of hybrid rigid–continuum robots. In our recent work, we developed a modelling package for hybrid rigid–continuum systems, named TMTDyn. It utilizes four different continuum robot kinematics representations: (i) series rigid-link, (ii) piecewise constant curvature discretization (discretised Cosserat based on relative states), (iii) Finite Element Method (discretised Cosserat based on absolute states), and (iv) reduced-order shape interpolation. TMTDyn features real-time simulation, via optimized C++ models, inverse jacobian, and load compensation formulations for controller and observer designs. TMTDyn benefits from an internal domain-specific language (DSL) using Matlab’s Object-Oriented capabilities and the concept of fluent interfaces to improve validation, understandability, and maintainability of the constructed models. In this presentation, we showcase modelling a variety of continuum robots with TMTDyn such as pneumatically and tendon actuated, concentric tube, and growing robots, following by a discussion on the resent nonlinear controller design implementations, language implementation, the benefits, and challenges of building a Matlab-internal DSL.
 Mr Jialei Shi
Mr Jialei Shi
PhD student in Soft Robotics, UCL, UK
Characterisation and control platform for pneumatically driven soft robots
This tutorial will begin by introducing an analytical modelling framework that can incorporate the influences of pressurised chambers and (non)linear material behaviours to achieve both kinematics, tip force generation, and stiffness analysis of robots. Additionally, I will showcase a design and evaluation framework that includes a toolbox with a graphical user interface built on the modelling framework, as well as a physical characterisation platform.
 Dr You Wu
Dr You Wu
MathWorks Industry Manager, USA
Make A Difference with Your Toolbox
Are you wondering about the potential impact of releasing your toolbox? By making your toolbox available, you can empower other researchers to tackle difficult problems and achieve more. But that’s not all. Your toolbox can also benefit professional engineers by reducing risk during product development and field deployment. It can facilitate communication and collaboration among large teams of engineers, and even help organizations accumulate and retain knowledge and experience. During this talk, I’ll draw on my personal experience to provide real-world examples of how modeling and testing tools can make a difference in engineering organizations.
There is an increasing number of analytical and numerical modelling approaches and frameworks for soft robotic manipulators emerging. Some of these modelling techniques offer design optimisation with regards to application-driven requirements, a thorough kinematic, stiffness, force analysis of the system, or an evaluation of a control strategy, to name a few. These mathematical tools in combination with experimental evaluation test rigs can be extremely powerful tools to gain detailed understanding of a soft robotic system.
This full-day event will provide a platform to researchers, who have created soft robotic toolboxes and experimental test rigs, (i) to give hands-on tutorial sessions, (ii) to explore requirements for a joint, soft robotic toolbox together with the soft robotic community, (iii) explore synergies of current toolboxes, and (iv) through a plenary discussion, identify what hurdles remain to advance this project of developing a joint toolbox resulting in a roadmap. The tutorial aims to bring together experts active in the field of creating modelling approaches for soft robotic systems, early-career researchers who have developed a keen interest in soft robotics and software industry. Early-career researchers will be given the opportunity to present a poster.
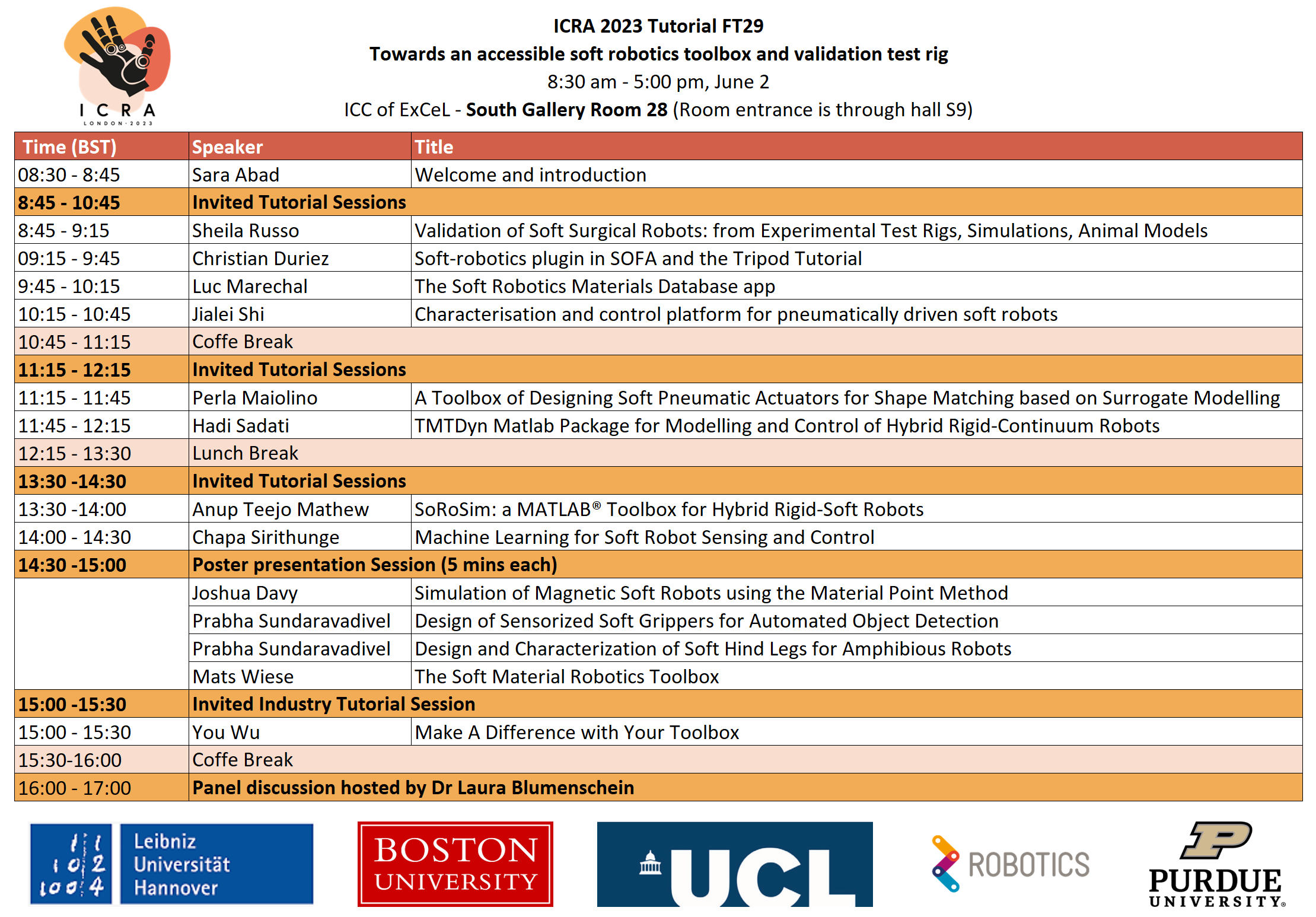
Schedule
Organisers
Dr Sara Adela Abad Guaman (corresponding organiser)
Assistant Professor in Adaptable Robotics, UCL, UK
Email: s.abad-guaman@ucl.ac.uk
Prof. Laura Blumenschein
Assistant Professor, Purdue University, USA
Email: lhblumen@purdue.edu
Mr Jialei Shi
PhD student, UCL, UK
Email: jialei.shi.19@ucl.ac.uk
Mr Jan Peters
PhD student, Leibniz University Hannover, Germany
Email: peters@match.uni-hannover.de
Prof. Annika Raatz
Professor of Mechanical Engineering, Leibniz University Hannover, Germany
Email: raatz@match.uni-hannover.de
Prof. Sheila Russo
Assistant Professor, Boston University, USA
Email: russos@bu.edu
Prof. Helge Wurdemann,
Professor of Robotics, UCL, UK
Email: h.wurdemann@ucl.ac.uk
