at the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 2 June 2017
Experts from the medical field and leading scientists from soft robotics, sensing and haptics. Live demonstrations are shown!
The event is supported by
![]()

The field of soft robotics has made inroads into a number of applications that have previously been dominated by rigid robots such as assistive technologies, surgical robotics and haptics. This workshop aims to bring together experts active in the field of creating sensors interacting with soft objects, understanding how sensory information is fed back to the human and studying haptic devices made of soft materials. We will explore the synergies that will arise from bringing together soft robotics and haptics and identify the advantages that these new soft materials bring to the field of haptics.
This ICRA 2017 workshop will provide a review of current technology using silicone and rubber materials for creating sensors on the one hand and haptic devices on the other hand. This will help exploring the reasons of current emergence of soft haptic interfaces and identifying the benefits associated with applying soft robotics in this field. The workshop will explore the challenges that lie ahead to create new robot systems that can enhance feeding back haptic information to the human in the future.
List of presentations
Soft robotics session:
Cecilia Laschi, Scuola Superiore Sant’Anna
Emerging soft robotics
Kaspar Althoefer, Queen Mary University of London
Soft robotics for minimally invasive surgery
Applications in healthcare session:
Shervanthi Homer-Vanniasinkam, University College London
Haptics in practice: How healthcare can benefit
Fong Sau Shung, Tan Tock Seng Hospital
Improving Patient Outcomes Through Surgical Augmentation
Nicolas Herzig, Imperial College London
Morphological computation of perception and action during physical examination of soft tissue
Sensing Devices session:
Nathan Lepora, University of Bristol
3D-printed soft biomimetic tactile sensors
Hongbo Wang, Ali Alazmani, Peter Culmer, University of Leeds
Ultrahigh-Performance Soft Tactile Sensors using Flexible Coils
Tiago Paulino, University of Lisbon
3-axis Soft Magnetic Force Sensor
Tito Pradhono Tomo, Waseda University
Implementation of a Soft, Distributed 3-Axis Skin Sensor System on a Robot Hand
Angela Faragasso, The University of Tokyo
Towards stiffness sensors for minimally invasive surgery
Haptic interfaces session:
Christian Duriez, French Institute for Research in Computer Science and Automation
Modelling interactions with soft objects
Margaret Koehler, Stanford University
Soft Haptic Shape Displays Using Particle Jamming and Pneumatic Actuation
Yongjun Lee, Seoul National University
Wearable Cutaneous Haptic Device with Soft Stretch Sensor and an IMU
Jacopo Buzzi, Politecnico di Milano
Arm joint angle variability analysis in virtual robotic teleoperation with two master devices
Herbert R. Shea, École polytechnique fédérale de Lausanne
Flexible Wearable 3D-Printed Electromagnetic Haptic Actuators Strips
Kyung Yun Choi, University of Illinois at Urbana-Champaign
Soft hand-held social robot
Final program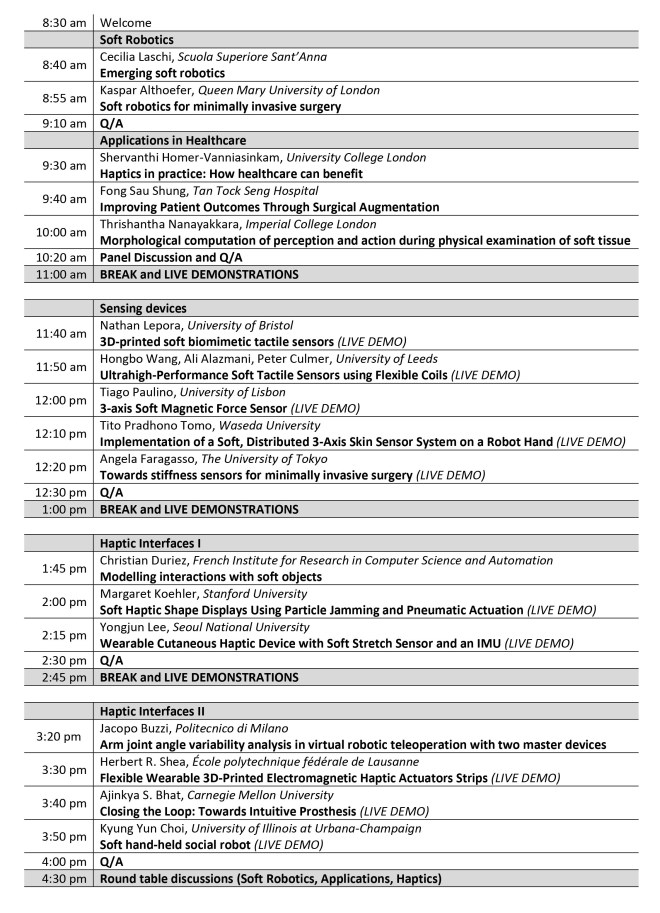
Invited Speakers
 Prof. Shervanthi Homer-Vanniasinkam
Prof. Shervanthi Homer-Vanniasinkam
University College London, UK
Haptics in practice: How healthcare can benefit

Dr.Fong Sau Shung
Tan Tock Seng Hospital, Singapore
Improving Patient Outcomes Through Surgical Augmentation

Prof. Kaspar Althoefer
Queen Mary University of London, UK
Soft robotics for minimally invasive surgery

Prof. Cecilia Laschi
Scuola Superiore Sant’Anna, Italy
Emerging soft robotics

Dr Thrishantha Nanayakkara
Imperial College London, UK
Morphological computation of perception and action during physical examination of soft tissue

Dr Christian Duriez
French Institute for Research in Computer Science and Automation
Modelling interactions with soft objects

Dr Angela Faragasso
The University of Tokyo, Japan
Towards stiffness sensors for minimally invasive surgery

Margaret Koehler
Stanford University, USA
Soft Haptic Shape Displays Using Particle Jamming and Pneumatic Actuation

Dr Nathan Lepora
University of Bristol, UK
3D-printed soft biomimetic tactile sensors
Organisers

Dr Helge Wurdemann
Department of Mechanical Engineering, University College London, UK
Email: h.wurdemann@ucl.ac.uk
Prof. Shervanthi Homer-Vanniasinkam
Warwick Medical School, University of Warwick, Coventry, UK
Leeds Vascular Institute & Leeds Institute of Genetics, University of Leeds, UK
Department of Mechanical Engineering, University College London, UK
Prof. Kaspar Althoefer
School of Engineering and Materials Science
Queen Mary University of London, UK
Prof. Cecilia Laschi
The BioRobotics Institute
Scuola Superiore Sant’Anna, Pisa, Italy

Prof. Allison M. Okamura
Mechanical Engineering Department
Stanford University, USA

Prof. Mandayam Srinivasan
Department of Computer Science
University College London, UK

Dr Vijay Pawar
Department of Computer Science
University College London, UK
 Prof. Yuru Zhang
Prof. Yuru Zhang
Robotics Institute, Department of Mechanical Engineering
Beihang University, Beijing, China

Prof. Dangxiao
Robotics Institute, Department of Mechanical Engineering
Beihang University, Beijing, China
